Detector
About
Both LUCI instruments are now equipped with Teledyne HAWAII-2RG (H2RG) HgCdTe detectors. These detectors are 2048 x 2048 pixels2. There is a border of 4 pixels around the edge that are used as “reference” pixels (the “R” in H2RG) and are not illuminated. The detector is read out by 32 amplifiers in parallel to keep the minimum DIT relatively low, although it still takes ~2.53 seconds to read out the full detector in LIR mode reading 100 kilo-pixels per second per amplifier. Each amplifier channel is 64 pixels high and 2048 pixels long.
On sky, the detectors are oriented in standard astronomical fashion, with north up and east to the left when the position angle is zero. On the Aladdin display, the amplifier channels are horizontal, read out from left to right. Images of the spectroscopic slits are vertical on the detector, thus for spectroscopy the dispersion direction is horizontal. Wavelengths increase to the right.
Characteristics
The QE and other characteristics of both detectors are quite similar, so, assume the missing LUCI1 values below are the same as LUCI2. The QE is about 83% from the dewar’s dichroic window cut-on to the red end of the K filter. This is a significant increase in QE (~60%) over the original first-generation Hawaii-2 detectors used for LUCI1. The dark current and read noise are low, allowing for background-limited observations in most imaging and spectroscopic configurations. There is significant persistence and nonlinearity with these detectors.
| Parameter | LUCI1 | LUCI2 | |
|---|---|---|---|
| Gain (e-/ADU) | 2.27±0.07 | 2.22±0.08 | |
| Dark Current (e-/sec/pix) | 0.030 | 0.023 | |
| Read Noise (e-) | LIR | 10.46 | 10.23 |
| MER | 5.42 | 4.92 | |
| Full Well Capacity (e-) | 120,000 | 127,000 | |
| Linearity (% at 40k ADU) | 11.6% | 11.1% | |
| Crosstalk at Saturation | <1.0% | <1.0% | |
| Persistence (e-/s/pix after 5min) | <2 | <2 | |
| Minimum DIT (sec) | LIR | 2.5273 | 2.5273 |
| MER | 6.3198 | 6.3198 | |
LUCI1 and LUCI2 gain, read noise, saturation (full well capacity) and dark current were re-determined June 2026. Keep in mind that these are global mean values…each pixel is electrically independent and on a pixel-to-pixel level there are variations in all these values. For example, while the distribution for dark current peaks at 0.03e-/s/pixel, there is a tail to higher values. 96% of the usable pixels have dark current <0.1e-/s/pixel, and only ~0.02% have a dark current above 10e-/s/pixel (the latter would normally be flagged as “hot pixels” during data reduction and thus ignored). A fully saturated image shows different saturation values near amplifier channel borders that in the “bulk” pixels, as do the ~150 pixels around the outer edge. There is even some real structure visible in the gain maps (analysis in 64×64 pixel sub images). Crosstalk and non-linearity can significantly impact observations with high dynamic range. For most normal observations you should always stay well away from saturation (<40000 ADU) and be background limited when possible. Researchers trying to push LUCI to the limit of what is possible should keep all of this in mind.
Read Modes
The LUCI instruments support three different detector readout modes appropriate for various observing applications/modes. These are: line-interlaced read (LIR), multiple endpoint read (MER), and sample-up-the-ramp (SUR). There are different regimes in observing where one of these modes is preferred over the other and are discussed in more detail below.
LIR
LIR mode is most useful when your observations reach a background-limited state quickly. Use this mode if the shot noise from the sky and/or source is much higher than any contribution from the intrinsic read noise of the detector. This is most commonly encountered when imaging through the N3.75 camera or in any mode (imaging or spectroscopy) if your target is bright enough that you would saturate with longer exposures, such as telluric star spectroscopic calibrations.

In LIR mode, as you clock through the 64 pixels in each line of an amplifier channel, the pixels are read out for the second read of the previous exposure, reset, then read again for the first read of the next exposure. So the previous and next exposures are interlaced, and there is very little dead time between exposures. The line-interlaced readout incurs a single ~2.53s readout overhead independent of the number of NDITs.
MER
MER mode, also known as Fowler sampling, is most useful when it might otherwise be difficult to reach background-limited conditions in a reasonable exposure time. Use this mode when the background from the sky between the OH emission lines is low (<1.65 μm), you are working at higher spectroscopic resolutions (spreading the background light over more pixels), or using narrower slits (not letting as much background light into the instrument).

In MER mode, the detector is reset, then read out non-destructively multiple times as fast as possible at the start of the exposure, then again the same number of multiple reads at the end of the exposure. For LUCI the number of multiple samples is fixed to five, a trade-off between larger overheads and increasing amplifier glow and other effects that limit the effective reduction of the read noise. The file saved to disk is the average of the five equivalent DCR exposures constructed from the data, so an MER mode readout has the read noise reduced by ~sqrt(5) compared to a single LIR mode readout. This may be seen as MER10 elsewhere in LUCI documentation as that is how it was originally called (5+5 readouts for MER10).
DITs shorter than 60 seconds are not likely to need MER mode readouts. Generally, most imaging and bright object spectroscopy (e.g. telluric standards) are background limited even using the LIR readout mode.
SUR
NOTE: This mode is still being developed and is not released for general use.
SUR mode is being implemented as part of a means to actively control the internal flexure in LUCI, which can affect any longer exposure observations. Use of this mode is only needed when active flexure compensation (AFC) is needed. This mode is primarily applied with low background spectroscopy or narrowband imaging, especially when using the N30 camera for AO observations.

In SUR mode, the detector is read out N times at equal intervals during the integration. The image saved to disk is derived from a linear fit through the measurements up the ramp for each pixel. Because N readouts are involved, the effective read noise is also reduced by a factor of sqrt(N/2) with respect to LIR readouts (If N=10, the read noise for SUR mode should be about the same as that of MER mode readouts). Normally N will be automatically set by the needs of the AFC algorithm, not by the user.
Saturation
Saturation is around 55kADU (~120k e-) in both LUCIs, though it is a function of both source brightness and readout mode. We recommend you stay below half-well (<27k ADU) for peak counts per DIT on your science targets to be safe. If data are linearized, it is possible to work nearly up to ~80% of saturation or ~40kADU.
Non-Linearity
All near-infrared detectors are non-linear. Both LUCIs are about 11% non-linear at 40k ADU for LIR-mode readouts. Even at 10% full-well (about 5500 ADU) they are already ~1.5% nonlinear. Thus, if you work with high-dynamic range data or you care about doing higher precision photometry, it will be very important to linearize your data.
Linearization should be applied to crosstalk-corrected (see below) LUCI data. The equations are:
ADU_lin = ADU_raw + 2.767×10-6(ADU_raw)2 for LUCI1
ADU_lin = ADU_raw + 2.898×10-6(ADU_raw)2 for LUCI2
Note that linearization is done on single-DIT raw data. For LIR mode integrated data you need to divide by NDIT, linearize, and then multiply back by NDIT. Using a global second-order constant like those above should reduce the photometric uncertainty to 1.2% if one stays below 80% of the full well capacity. However, there is some structure in the linearization fits across the detector, with an outer frame and the keyhole showing slightly different corrections from the remainder of the detector. Thus for particularly demanding observations, where data spans the full dynamic range of the detector or there are particularly tight requirements on the overall photometric accuracy, linearization using a full 2D pixel map will be necessary. Formally, there is a readout overhead correction term needed (1+e) as well, but for LIR mode data this is negligible.
Since any reduction of the data will include subtraction of a dark or temporally adjacent image, zero order constant term from the linearization fit is not included. Strictly speaking, these equations are only valid for LIR-mode data. The linearization coefficient for the MER readout mode has not been explicitly measured. It should have the same form as in the equations above, but the LIR results suggest the constant would be different. Proceed with normal reduction algorithms using the linearized data.
Persistence
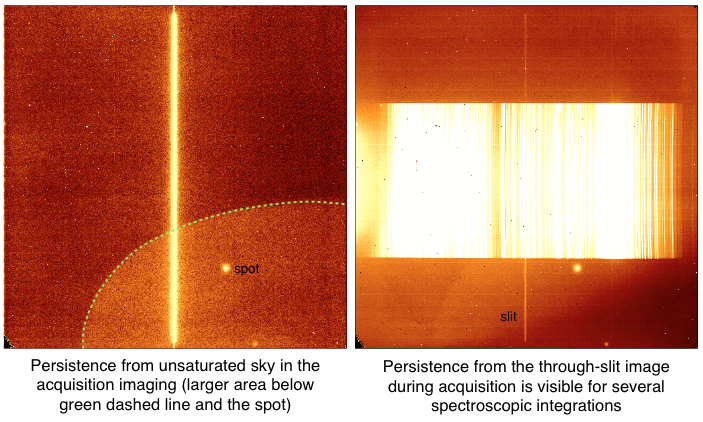
The H2RG detectors in LUCI show relatively high persistence. There is also some intrinsic structure to the persistence pattern on the detector. You will see persistence signals most strongly when you have bright sources in short exposures followed by exposures with low backgrounds. This can happen during a spectroscopic acquisition sequence as in the example below, or when imaging a field with bright stars in it. As with crosstalk, you do not need to saturate the detector to produce a persistence image.
Persistence decays relatively quickly (proportional to ~1/time) but can persist for quite a long time, and it acts like a dark current so you see more of it in longer exposures. Nearly 80 minutes after taking saturated exposures through the crosstalk mask there were persistence images still visible, though only a few tens of ADUs in a 300s exposure or about 0.25e-/s/pixel. Since the data you take gives you the history of past exposures on the detector, persistence mitigation involves observing with maximally non-redundant (randomized) dither patterns, and using the past exposures to create masks to explicitly ignore locations affected by persistence.
Crosstalk
Infrared detectors are subject to channel crosstalk between amplifier channels. This originates at the gold wire-bonds along the edge of the detector where the 32 amplifier channels (2048×64 pixels) are read out in parallel. Because of how the detector is read out now, left-to-right with adjacent channels being read out in opposite directions in Y, the crosstalk signals show up with vertical spacing in multiples of 64 pixels, with the crosstalk signal flipped vertically in the channels read out opposite to the channel where the primary image is located).
Examples of this channel crosstalk are shown below. The left and center sub panels are from LUCI1 and LUCI2 imaging data of masks made for calibrating the crosstalk. The green squares mark the location of the primary source while the blue rectangles show the regions where the crosstalk signals from that primary source will be located. There are other crosstalk signals visible in both images. These originate from additional apertures in the mask outside the 256^2 pixel cutouts shown here. The right sub panel is a spectroscopic exposure of a telluric standard, again 256^2 pixels, with the primary location marked between the green lines. The crosstalk is visible in the three horizontal black/white stripes below the primary, while the vertical white lines are OH emission from the atmosphere.

The signal levels vary from amplifier to amplifier, as can be seen in the images above. In the leftmost blue rectangle there is a weaker crosstalk signal just above the primary and a stronger one near the bottom. The plot here  shows one of the stronger crosstalk signals on each LUCI as a percentage of the primary’s peak counts (Y axis) as a function of the peak counts in the primary shown as percent of saturation (X axis). These were pulled from the calibration data for a single relatively strong crosstalk signal in each LUCI. The crosstalk signal remains a reasonably fixed percentage (typically below 1%) of the primary flux in both LUCIs, independent of the signal level in the primary, from low counts all the way to saturation. Crosstalk is always present in LUCI data, though it shows most easily when high-contrast observations are being made (e.g. observing bright stars). If your science includes looking for really faint sources in data that also contains brighter sources, please keep this in mind. Crosstalk also does not care where the primary signal comes from, so cosmic rays and hot pixels can also induce crosstalk in the other amplifier channels. There is no correction algorithm currently available.
shows one of the stronger crosstalk signals on each LUCI as a percentage of the primary’s peak counts (Y axis) as a function of the peak counts in the primary shown as percent of saturation (X axis). These were pulled from the calibration data for a single relatively strong crosstalk signal in each LUCI. The crosstalk signal remains a reasonably fixed percentage (typically below 1%) of the primary flux in both LUCIs, independent of the signal level in the primary, from low counts all the way to saturation. Crosstalk is always present in LUCI data, though it shows most easily when high-contrast observations are being made (e.g. observing bright stars). If your science includes looking for really faint sources in data that also contains brighter sources, please keep this in mind. Crosstalk also does not care where the primary signal comes from, so cosmic rays and hot pixels can also induce crosstalk in the other amplifier channels. There is no correction algorithm currently available.
Other Issues
 The LUCI2 detector has one amplifier channel (the second one down from the top) that is showing a different gain than the other channels. This channel is not “dead”, although it often shows up as a black bar across the top of the image display (see image…the RTD will now correct for this while observing, but the raw data is not modified). As this channel is outside the region covered in spectroscopic mode with the N1.8 camera and near the edge of the imaging field of view, priority to investigate and potentially fix this is low. Any attempted repair will likely require sending the detector back to Teledyne.
The LUCI2 detector has one amplifier channel (the second one down from the top) that is showing a different gain than the other channels. This channel is not “dead”, although it often shows up as a black bar across the top of the image display (see image…the RTD will now correct for this while observing, but the raw data is not modified). As this channel is outside the region covered in spectroscopic mode with the N1.8 camera and near the edge of the imaging field of view, priority to investigate and potentially fix this is low. Any attempted repair will likely require sending the detector back to Teledyne.
You can mostly recover the data in this channel (in iraf the region is [*,1921:1984]) by multiplying all pixels by a factor adjusted empirically to match the mean counts in the background data in the adjacent amplifier channels. If critical for science the safest route would be to simply mask out this entire amplifier channel.
The image above also shows a shadow in the lower right corner. This is part of the AO optics bench that is always visible in the 4’x4′ field of view, though it does not affect AO operations that only covers the central 30″x30″. When running ESM mode this vignetting can be worse at some dither positions with the AO reference star in the upper half of the patrol field. This is shown in the OT. It can be masked out in data reduction, and mostly avoided with a well-designed observation and dither pattern.